Quadcopter Project


For my Duke of Edinburgh Bronze Skill section, I decided to make a quadcopter, involving myself into the design, sourcing of correct components and making the drone get off the ground. I now regret not taking more pictures or keep some of the design files. I started off by designing the frame intended to be roughly 500-600mm from motor to motor. The main plate consists of an octagon onto which the arms and other parts can be attached onto.

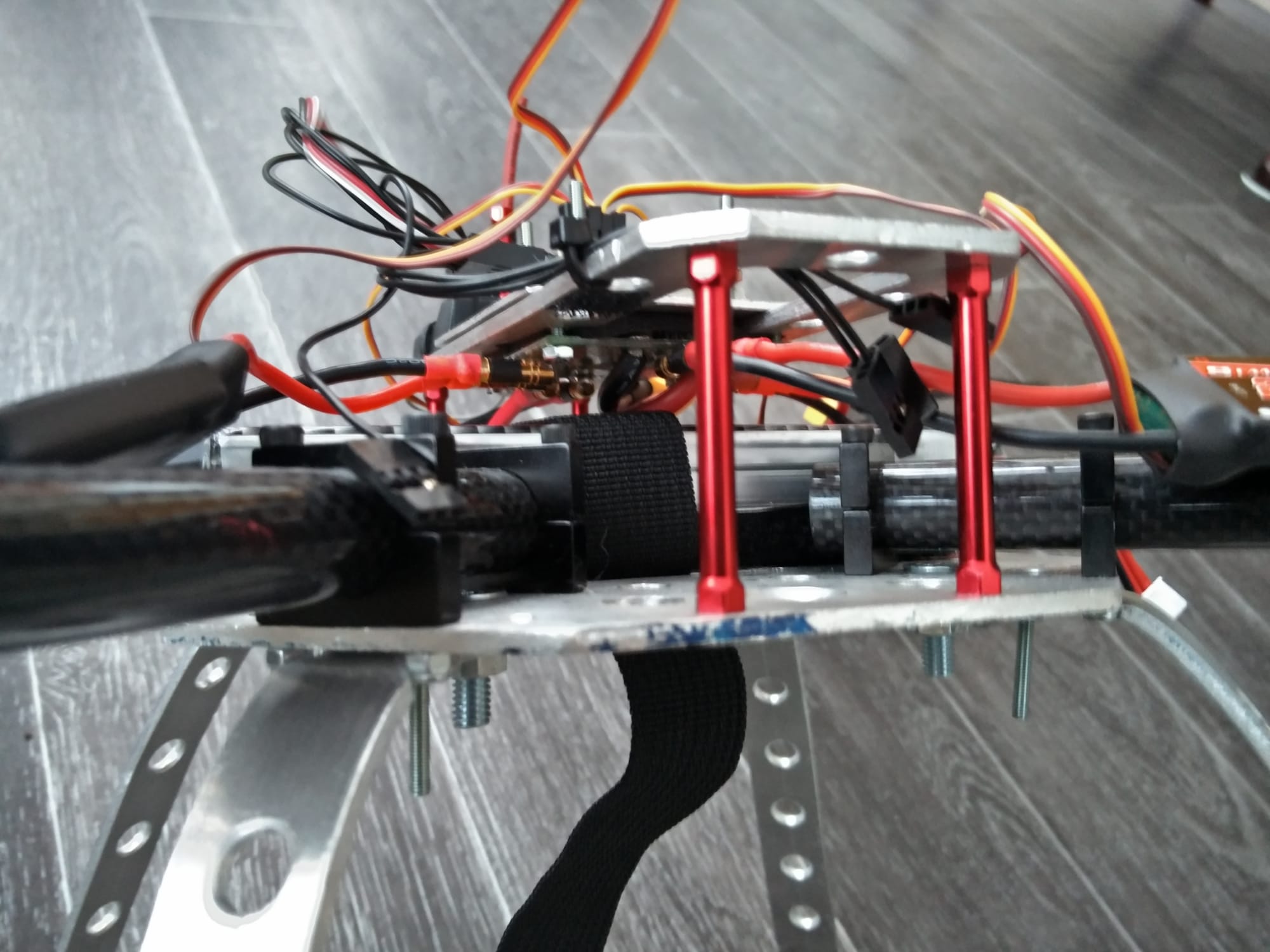
Later in the project, I moved the motors further out since it would give each motor more leverage and be able to maneuver with more ease. The frame consisted of an aluminium core frame using 3mm aluminium alloy. A rectangular plate was attached to main plate by 40mm aluminium spacers which also improve the strength of the frame. Onto the rectangular plate, the microcontroller is mounted onto using a sponged rubber as an insulator as well as a vibration dampener (since vibrations will affect the gyroscope readings). The receiver is also placed on this plate. From the main plate, 4 legs are attached onto the bottom which are made out of aluminium 3mm plate again but bent to a specific shape using a former. A camera mount has also been placed upside down onto the underbelly of the frame which you can just see poking out in front face of the frame.

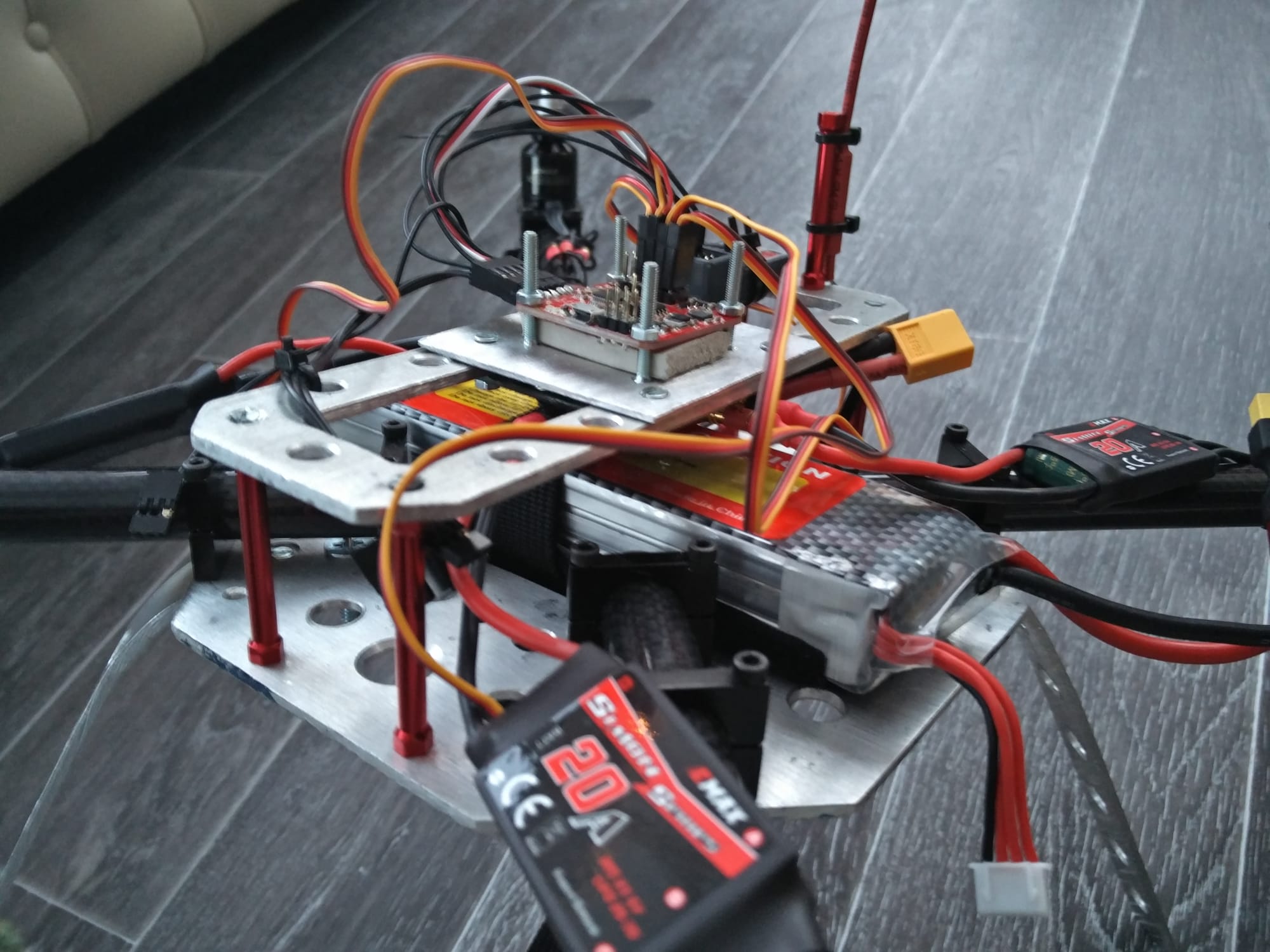
As you can see, the quadcopter is pretty large. The battery goes to a distribution board where the electricity is split in 4 directions in parallel - from here it is connected to the ESC (Electronic Speed Controller) which allows the motor to be controlled by a micro-controller via a BEC cable (3 wires, positive, negative and signal). What the ESC does is provide the correct amount of current and volts for the motor as well as being able to give a burst increase in current on demand by use of on-board capacitors and without the ESC, the brushless motor is unable to run. The motor used is a brushless outrunner. Outrunners are more favorable since the rotor is on the outside, providing much higher torque than a regular motor (inrunners where the rotor is on the inside) at the expense of reduced RPM. But this means it is able to turn a longer, heavier propeller without needing a gearbox. Every motor has a specific kV which refers to how much RPM is increased by every volt. Typically high kV motors have low torque and are associated with small diameter motors. The current, however, increases the torque of the motor. The battery used was a high capacity LiPoly battery which although is lower in capacity than a Lion battery, it is much lighter making it more ideal for the aerial device that is in where weight is always an issue. The battery was a 3S battery - meaning it had 3 Li-Poly cells totaling to around 11.1V.
All this knowledge gained about hobbyist electrical components helped me a lot especially in my recent bladeless fan project which used similar components.
The ESCs' BEC cables are connected into the microcontroller which was a Naze32 board which had a micro-USB slot which allowed me to use a special desktop software specifically for drones to setup the program and calibrate it. This took a while to get working especially with the 7 channel transmitter which did not have particularly intuitive software.
 Here you can see the underbelly of the frame. There are 3 large slots which the two outer ones used a way to tie the battery down tightly. Sticky Velcro was also used between the battery and the frame just to be sure. The battery had to be central to keep the weight balanced and this was particularly important with the battery since it was easily the heaviest electrical component. You can also see the black camera mount for a cheap knock-off GoPro which had internet connectivity to allow for remote viewing. The 3mm aluminium was definitely a mistake and did not need to use such thick aluminium and the weight became a concern for me despite using carbon fiber (cheap Chinese carbon fiber though) extensively in the arms. Drill holes were added everywhere to reduce weight were possible. Weight was well within the thrust capabilities of the motors but it would hinder performance and flight time.
Here you can see the underbelly of the frame. There are 3 large slots which the two outer ones used a way to tie the battery down tightly. Sticky Velcro was also used between the battery and the frame just to be sure. The battery had to be central to keep the weight balanced and this was particularly important with the battery since it was easily the heaviest electrical component. You can also see the black camera mount for a cheap knock-off GoPro which had internet connectivity to allow for remote viewing. The 3mm aluminium was definitely a mistake and did not need to use such thick aluminium and the weight became a concern for me despite using carbon fiber (cheap Chinese carbon fiber though) extensively in the arms. Drill holes were added everywhere to reduce weight were possible. Weight was well within the thrust capabilities of the motors but it would hinder performance and flight time.
General timeline:
1. Soldered bullet connectors to the motor and ESC wires
2. Assembled arms with the motors and ESCs
3. Manufactured the aluminium part of the frame and then assembled all the hardware together.
4. Added electrical components
5. First set of ESCs were incorrect and did not have a BEC cable and hence couldn't be connected to the micro-controller
6. Correct type of ESC (more expensive and bigger though) came, soldered bullet connectors.
7. Calibrated the micro-controller
8. Plugged all the electrical components together with the live battery to setup software for the micro-controller. One of the ESC's wires were wrong way round when connected to the distribution board (positive wire in negative slot, etc). This led to the ESC shorting out and smoking. New ESC had to be ordered.
9. Replaced the broken ESC with the new one. Did some general software setup for the microcontroller.
10. One of the cables broke off the new ESC despite little force applied. Another replacement had to be obtained.
10. Transmitter came in. But took a long time to get the transmitter working and connecting with the receiver on the quad-copter and even then it was very dodgy trying to get them to connect
11. During an attempt of a take-off, I found one of the motors (the same motor that had the broken ESC) was running at a lower speed compared to the other three since that corner was still on the ground whilst the other 3 had lifted off. I had to abort since it would definitely had to lead to catastrophic crash.
12. Bought a ESC programming card to ensure that the acceleration curves on all of the ESCs were the same (since replacment ESC came from a different supplier despite being the same model). Tested again and this did not solve the issue.
13. To check whether it was the motor or the ESC that is at fault, I switched the ESC with another one from a different motor. The change of ESC did not get rid of the issue with that particular motor with the motor still having a reduced speed. This meant that the motor needed replacing
14. Through more testing, the broken motor stopped working at all but unfortunately another motor also began to fail and stopped running.
15. Due to time and cost of the project so far, it had to be stopped as I did not want to burn through more money. It's a shame that it never took off. I still learnt a lot about the electronics, designing, testing and more, often learning the hard way.
